Spent the day Friday touring Wakamatsu Tea and Silk Colony Farm, an historic area above the American River in Gold Hill with one of co-conspirator Jason Pittman’s California Geography classes. Visited the grave of Okei, the first recorded burial of a Japanese woman in the United States.

Jason and his students have done some work for the American River Conservancy in the past, GPSing trails and the like, and we’re working on a plan to do some aerial imaging in support of ARC’s Wakamatsu re-vegetation and de-vegetation efforts – yellow star thistle is a mean invasive weed, and it is everywhere on the Wakamatsu property (and throughout the county). Following the tour, we assembled and practiced flying the delta. The anemometer was registering inconsistent winds at ground level in the 2-4 mph range, which was enough to get the kite up in the air a few times, but not enough to keep it there, nor to allow it to really lift the camera rig.

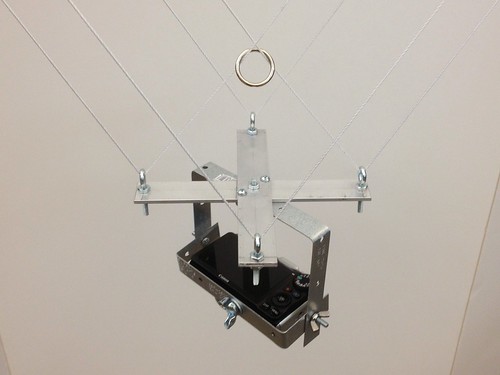
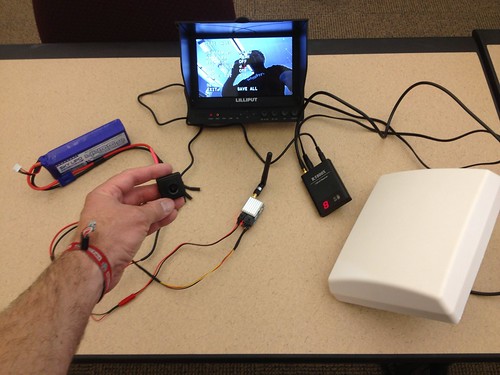
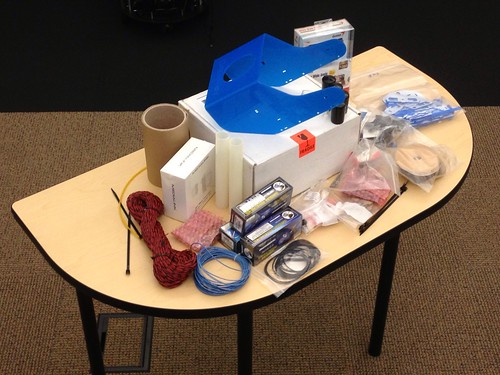
Though we weren’t able to gather any images, we did learn a lot about flying the kite, rigging the picavet, and what to include in our KAP kit. All in all a successful day. Always be prototyping!