Kite? Check. Helium? Check. It takes quite a bit of gear to execute a proper field day. Professor Jason Pittman arranged a KAP/BAP field day, and we headed up to the wetlands on the north end of campus to meet students around noon. Following a brief safety talk and protocol orientation, one team set out to launch the balloon, while the other team assembled and attempted to launch the kite.

Half-full, balloon #1 revealed some pinhole leaks, so we tried to move the gas to a second balloon, which didn’t work at all, and we popped the first one in the process. Fortunately, we were able to get one of the spares filled and in the air.

The kite team struggled with inconsistent wind. After many heroic attempts, they eventually scrapped the launch and joined the balloon team to walk the wetlands.

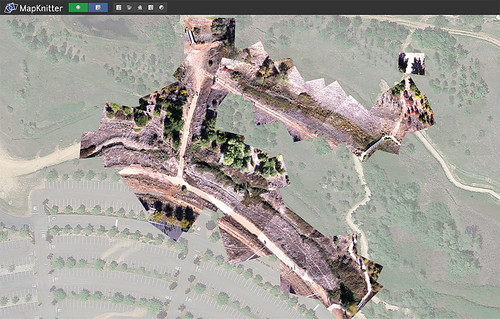
We flew for ~40 minutes, with the camera (iPhone on the picavet, running Timelapse at 10 second intervals), and captured some really good shots. (Link: The full set images from 04.24.15 BAP field day.)

At 2 o’clock, we headed back to the cars to stow the gear and head out. A few students hung around and had a chance to fly our newest quad.

All things considered, a successful field day.